

Chassis – arm – electronic integration (VI)
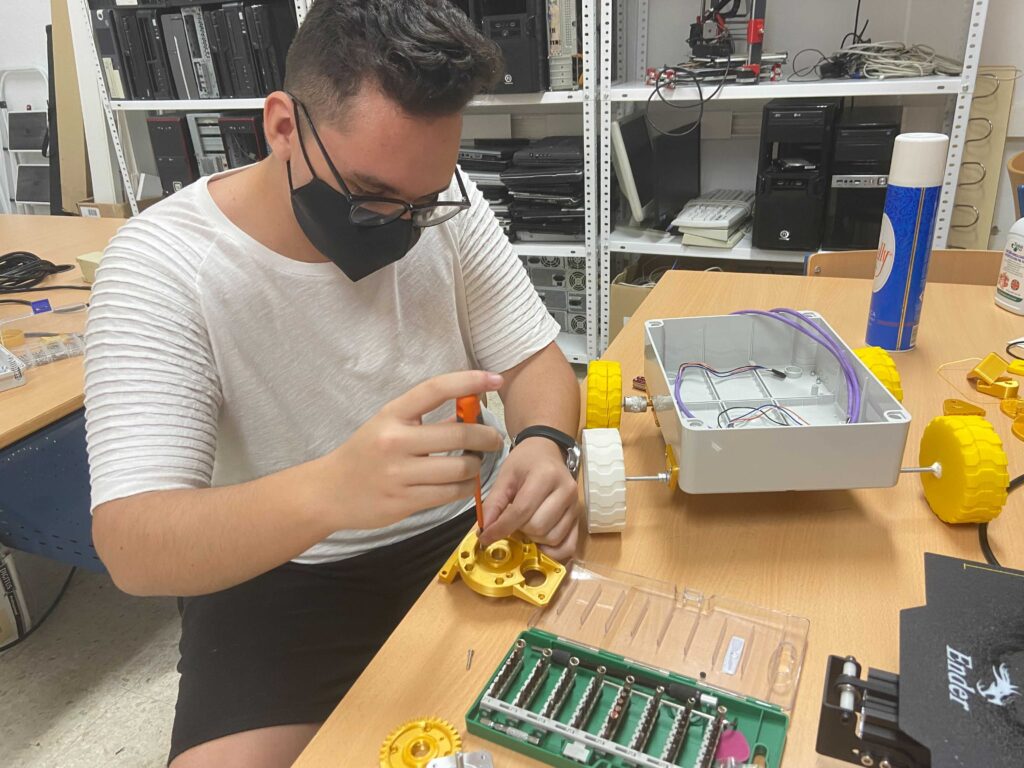
Once all the necessary parts were printed, we began to assemble a rover to test the whole system. Using as many plastic parts as possible, we created our rover and the result is the following one:

As can be seen, the wheels have also been printed on the 3D printer. The largest number of plastic parts have been used so that the detector does not have interference from the rover.
After testing the movement of the arm that makes the sensor sweep the ground, it has been found that surely it is not necessary to add a counterweight.
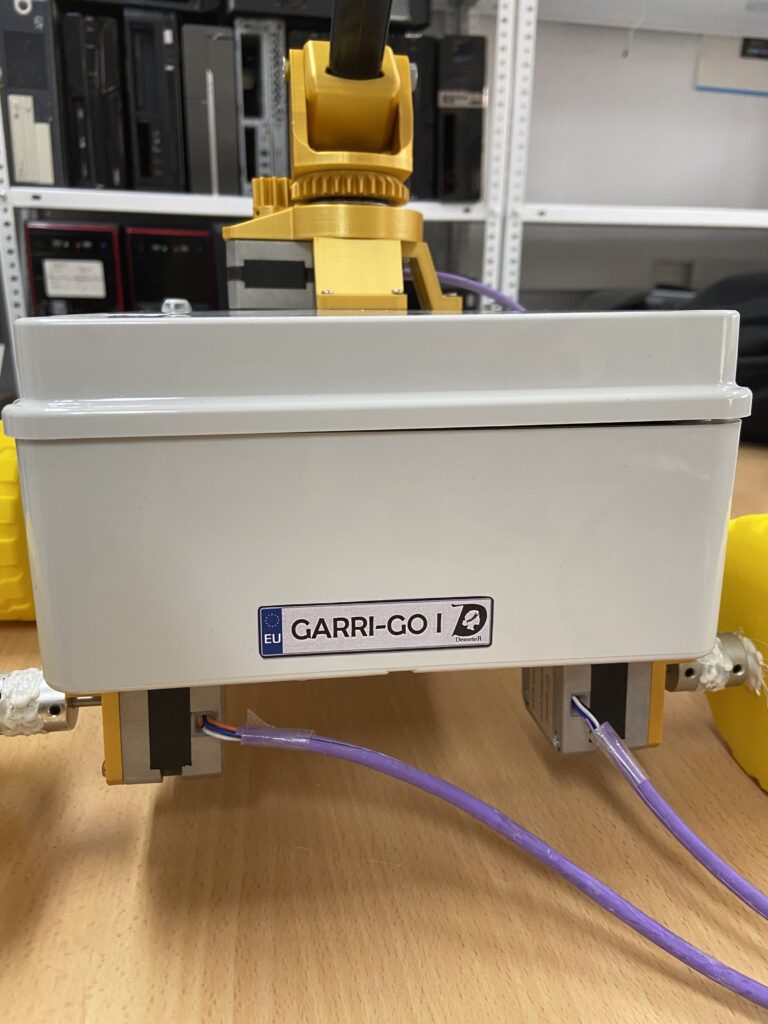
We have named our test rover Garri-go in honor of Marc Garrigou, the French coordinator of the project who has suffered an accident and is fortunately doing well.

The French team is making great progress and has been able to test the arm pivot verifying that it works correctly.
Below is a video with the progress made till now:
We have detected by directly connecting the batteries to the RAMPS of the Arduino that their performance is erratic and not stable. Also the batteries do not have the expected life. The solution will be to include between the batteries and RAMPS a power distribution board like the following:
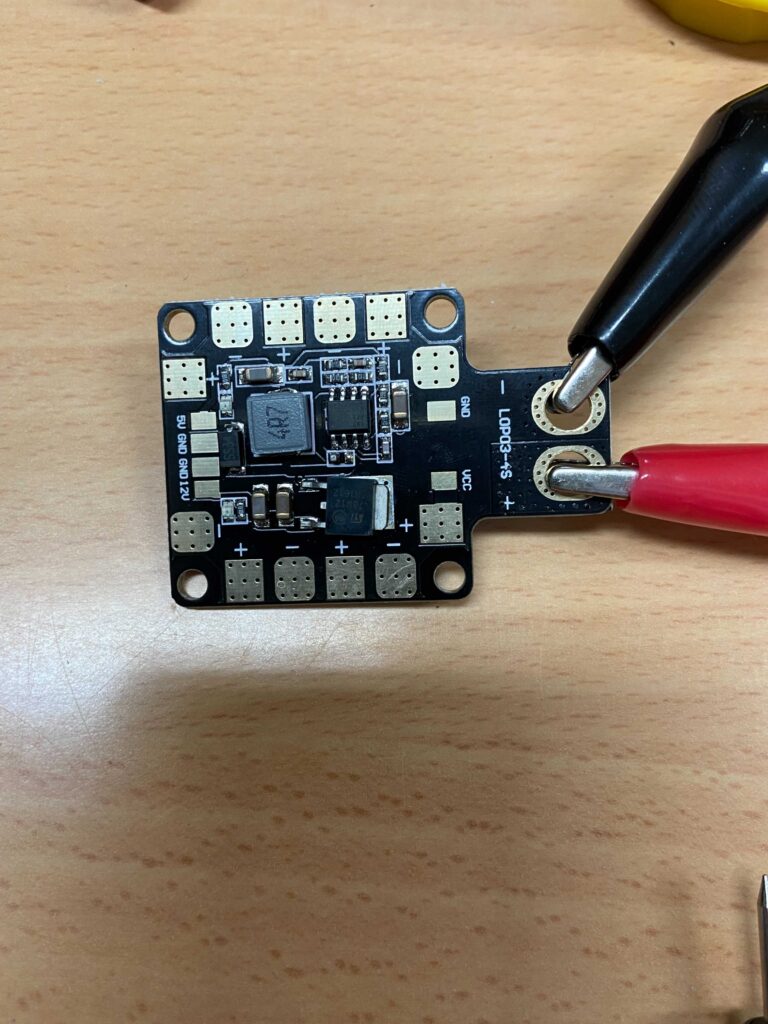
It is the same board that we have used in the drones for the ICAROS project.